
在快递需求日益增长的今天,为了实现快递运送过程的无人化,减少快递物流行业的人力成本,市场上已经出现了将快递从货仓运至用户家中的仓外物流小车,比如京东公司出品的京东物流小车等,但货仓内部对货物的分拣和运输还是需要人力完成。即在货仓内将对应货物取出,交付给仓外的物流小车这一过程仍旧需要人为实现。
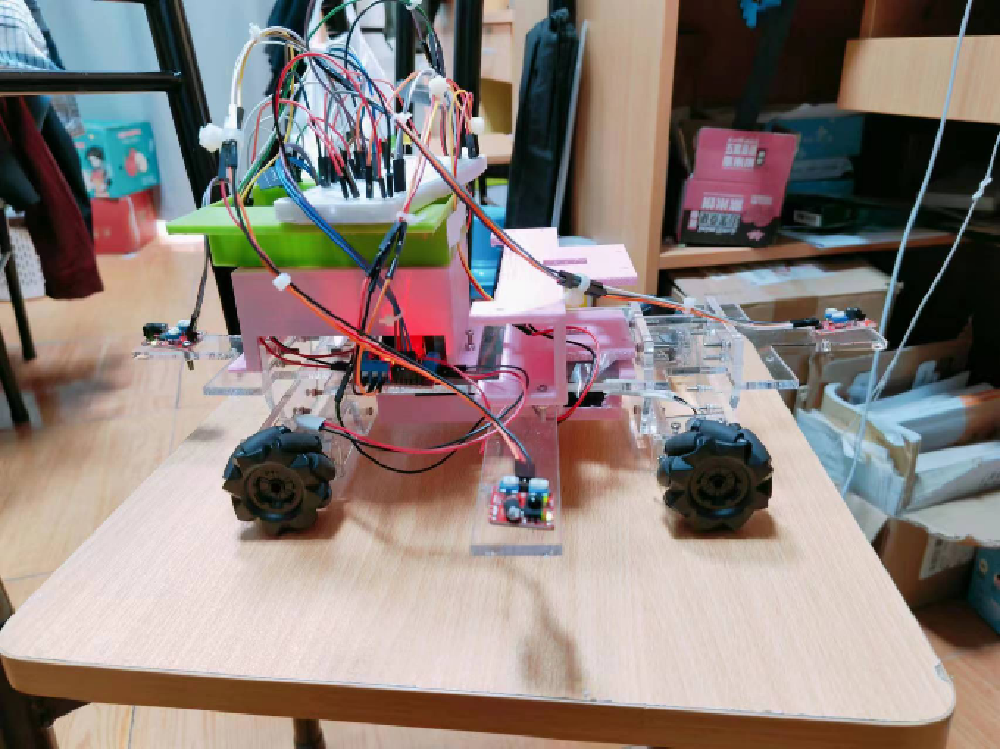
因此本项目旨在制作一款针对仓内的全向智能搬运小车,针对货仓内部可能发生变动的环境障碍,小车可以实现面向动态环境的实时避障;而由于仓内路径狭窄,为了提高小车的体积从而增大载货重量,项目采取了无转弯半径的全向移动小车设计;同时小车也要能实现对货物的抓取、放置等功能。本项目目标是完善快递的无人化过程,进一步削减快递行业中的人力成本。
目前项目小车已完成了针对室内场景的智能避障,目标导航,物体抓取三大部分的功能。小车可以通过红外传感器对环境障碍进行实时检测,经过实体机的运行测试,确保了在任何新环境下小车都能成功完成智能避障这一目标。通过给定符合仓内参考系的目标点的坐标,小车可以在避障过程中逐渐向目标点逼近,最终成功避开障碍达到目标点,实现导航功能。在到达目标点位之后小车通过一个五自由度的机械臂可以实现对货物的抓取。
