
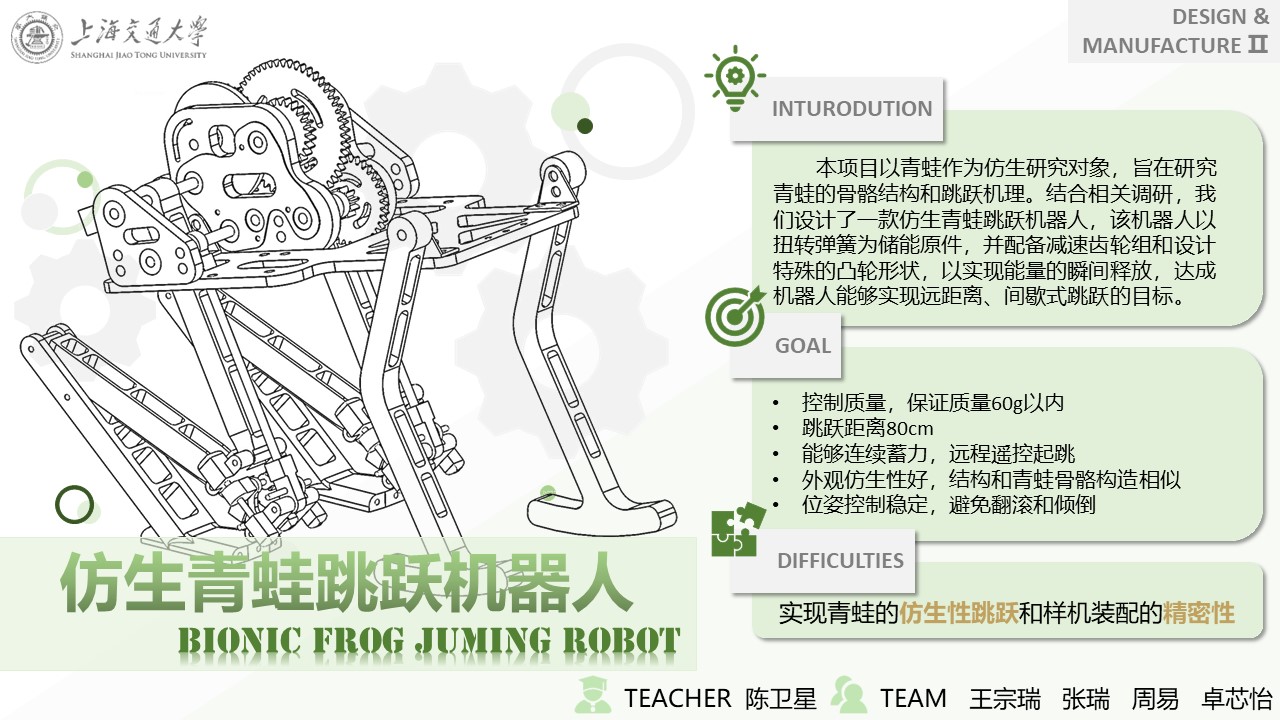

基于设计与制造Ⅱ课程项目所设置的项目挑战赛——仿生青蛙跳跃机器人,本项目以青蛙作为仿生研究对象,旨在研究青蛙的骨骼结构和跳跃机理。结合相关调研,我们设计了一款仿生青蛙跳跃机器人,该机器人根据青蛙骨骼结构,创造性地设计双平行四边形结构模拟青蛙后肢,以扭转弹簧为储能原件,配备减速齿轮组和设计特殊的凸轮形状,并通过红外遥控方式远程控制,以实现能量的连续储存和瞬间释放,达成机器人能够实现远距离、间歇式跳跃的目标。
1. 控制质量,保证质量60g以内;
2. 跳跃距离800mm;
3. 能够连续蓄力,远程遥控起跳;
4. 外观仿生性好,结构和青蛙骨骼构造相似;
5. 位姿控制稳定,避免翻滚和倾倒。
1. 结构精巧,质量控制在60g以下;
2. 跳跃距离10cm;
3. 通过凸轮控制,扭转弹簧蓄能的方式,完成了连续蓄力,实现了间歇式跳跃。使用红外遥控方式远程控制起跳;
4. 创造性地通过双平行四边形模拟青蛙后肢股骨,跗骨,模拟青蛙起跳姿态,设计外壳,保证了良好的仿生性;
5. 双平行四边形机构和限位关节配合,保证了青蛙按照定直线加速,消除了起跳时刻机架的旋转;
6. 通过图解法设计轮系避免干涉,避免了复杂的不等式组运算。
