
News
News
Recently, Professor Wenming Zhang’s group from School of Mechanical Engineering published a research paper, entitled “An Intelligent Spinal Soft Robot with Self-sensing adaptability”in The Innovation. This paper proposes a soft robot that is capable of self-sensing and adaptation, which exploit the reversible feature of piezoelectric effect to design a bionic spine with an integrated sensing-actuation functions, endowing the soft robot with superior locomotion and the awareness of different environments. This paper is first co-authored by Shoulu Gong and Fuyi Fang, two PhD candidates. Corresponding authors include Prof. Zhiran Yi, Prof. Lei Shao, and Prof. Wenming Zhang.
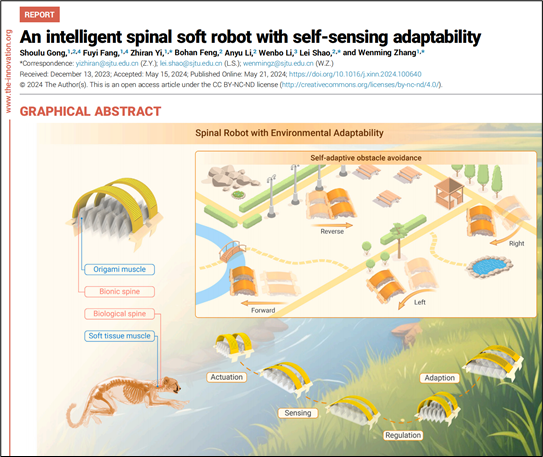
Environmental adaptability is an important feature for soft robots to achieve efficient locomotion and it is still challenging to design and develop an intelligent soft-body robot with independent decision-making and spontaneous regulation capabilities like a living organism. In this paper, a bionic spine with integrated sensing and actuation functions is designed by imitating the spine and soft-tissue muscles of living organisms, while a pneumatic origami actuator is utilized as an artificial muscle for realizing an intelligent soft robot with self-sensing and adaption capability. The bionic spine leverages reversible physical effects to provide torso support, auxiliary actuation and perceptual regulation for soft robots.
This work was supported by the National Natural Science Foundation of China, China (12102250 and 12032015), the Science and Technology Innovation Action Plan of Shanghai, China (21190760100), the Medical Engineering Interdisciplinary Research Fund for "Star of Jiao Tong University" of Shanghai Jiao Tong University, China, and the Oceanic Interdisciplinary Program of Shanghai Jiao Tong University, China (SL2023MS006).
Paper link: https://www.cell.com/the-innovation/fulltext/S2666-6758(24)00078-X?rss=yes

Shanghai Jiao Tong University
Address: 800 Dongchuan Road, Shanghai
200240